
DATAPLICITY “VS” PI-STAR
Quando scrivo un articolo di solito tendo sempre a non dare per scontato quello che vado a descrivere, per questo motivo farò 2 accenni ai prodotti a cui faccio riferimento, …

Quando scrivo un articolo di solito tendo sempre a non dare per scontato quello che vado a descrivere, per questo motivo farò 2 accenni ai prodotti a cui faccio riferimento, …
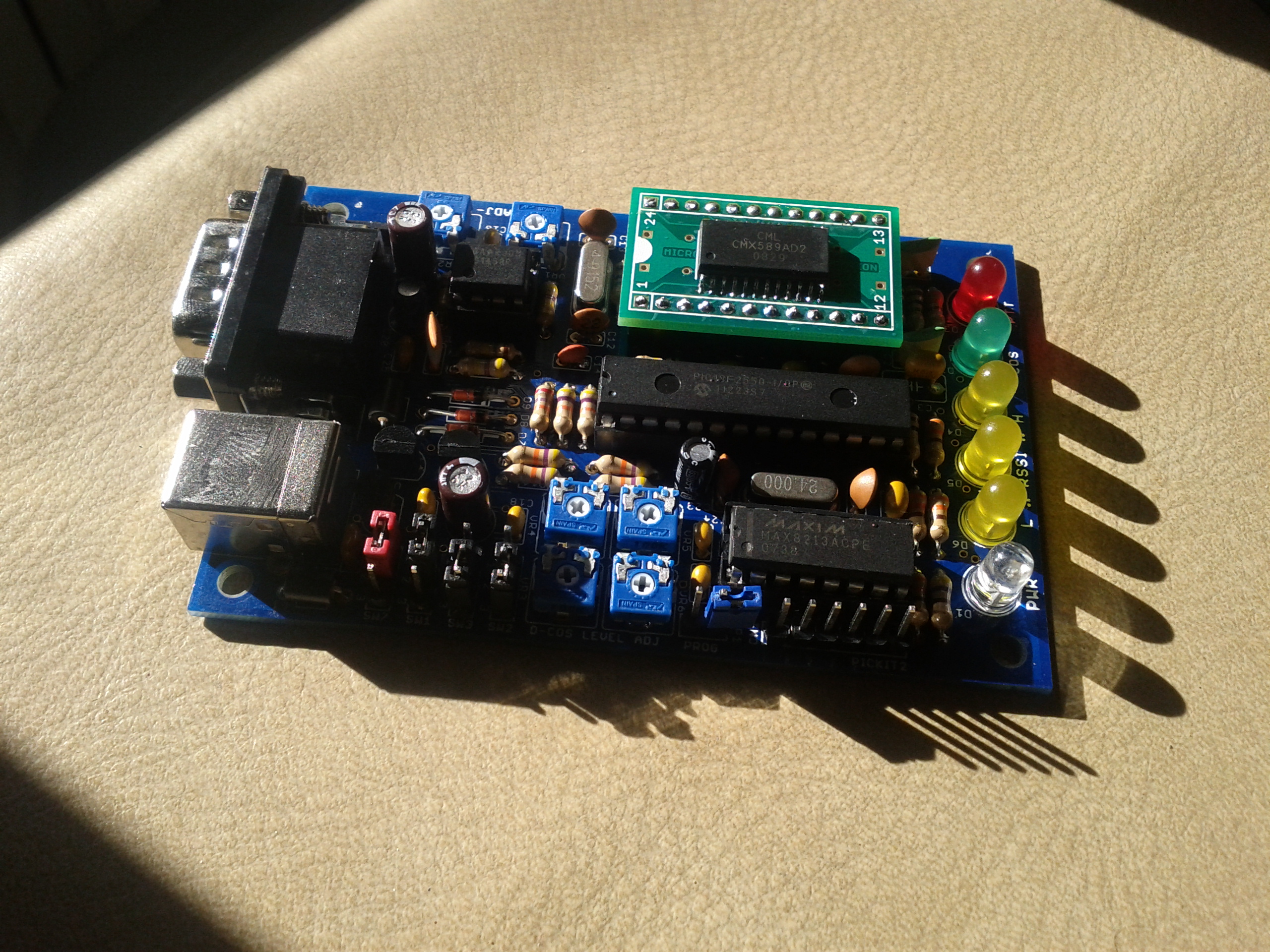
E’ da un po’ che gira sul noto sito di aste online questa versione “particolare” di MMDVM, e incuriosito me ne sono fatta arrivare una dagli amici asiatici. Di cosa …
Oggi ho finalmente ricevuto la tanto desiderata interfaccia DUTCH STAR MINI HOT SPOT nella sua ultima revisione hardware e software. Per chi non sapesse di cosa si tratta, abbiamo avanti …